|
Quentin Leboutet I'm a research scientist at Intel in Munich, working on the generation of 3D and articulated assets using diffusion models. At Intel I also contributed to the development of the SPEAR photorealistic simulator, the Open3D library and the OpenBot framework. I completed my PhD in Electrical Engineering and Computer Science at the Technical University of Munich, under the guidance of Prof. Gordon Cheng. Email / CV / Scholar / Linkedin / Github / ResearchGate / HuggingFace |

|
ResearchI'm interested in generative AI, deep learning, agentic AI, LLMs, and robotics. My PhD research focused on Robot Control, Tactile feedback, State Estimation and Inertial Parameters Identification. |
|
HoloScene: Simulation-Ready Interactive 3D Worlds from a Single Video
Hongchi Xia, Chih-Hao Lin, Hao-Yu Hsu, Quentin Leboutet, Katelyn Gao, Michael Paulitsch, Benjamin Ummenhofer, Shenlong Wang. NeurIPS, 2025 Project page / Paper / Code HoloScene is a novel 3D reconstruction framework that creates simulation-ready digital twins with complete geometry, realistic physics, and photorealistic rendering for interactive applications. |
|
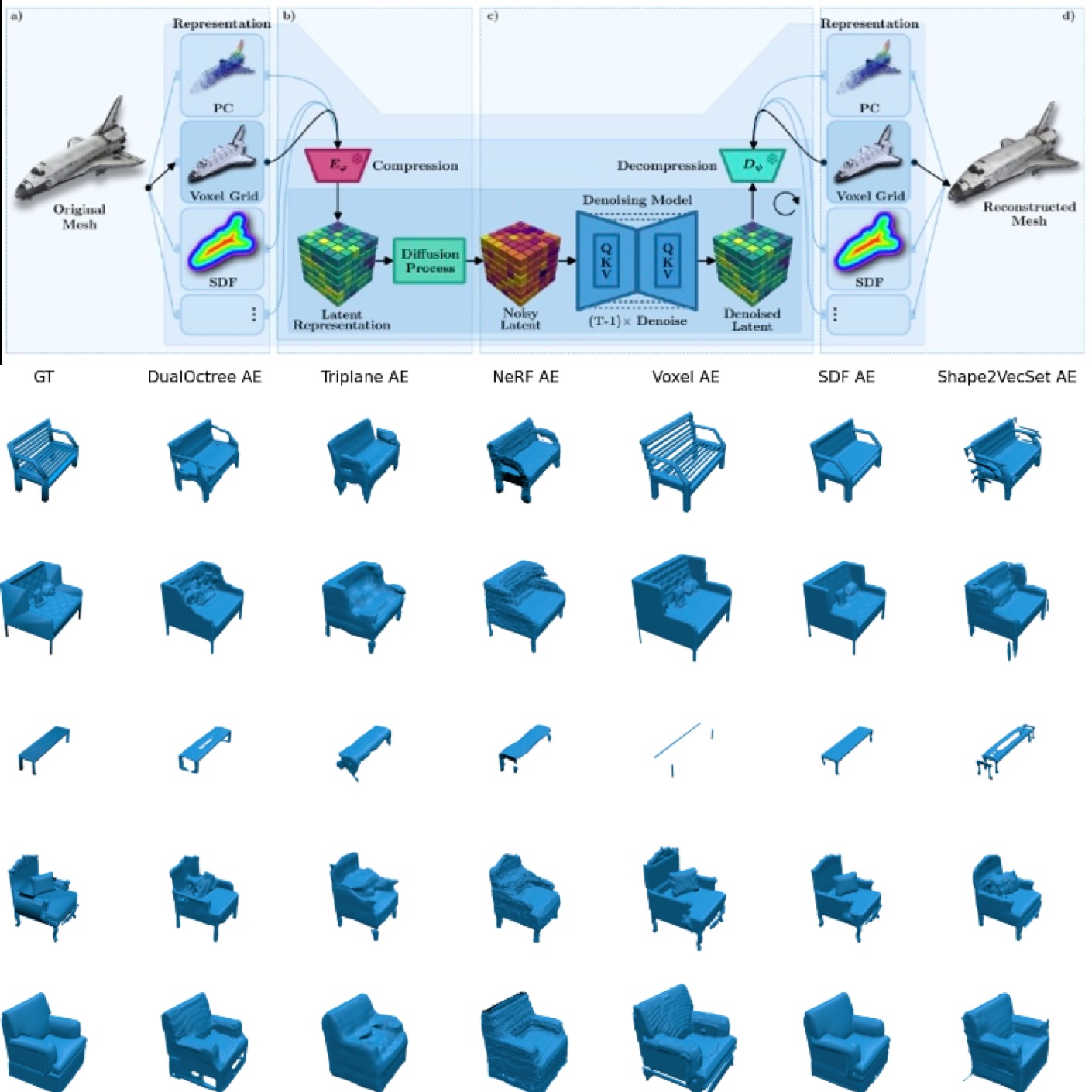
Unifi3D: A Study on 3D Representations for Generation and Reconstruction in a Common Framework
Nina Wiedemann, Sainan Liu, Quentin Leboutet, Katelyn Gao, Benjamin Ummenhofer, Michael Paulitsch, Kai Yuan. TMLR, 2025 Project page / Paper / Code A unified, end-to-end benchmark that compares 3D representations - from voxels and NeRFs to SDFs, point clouds, and octrees - used in generative tasks. |
|
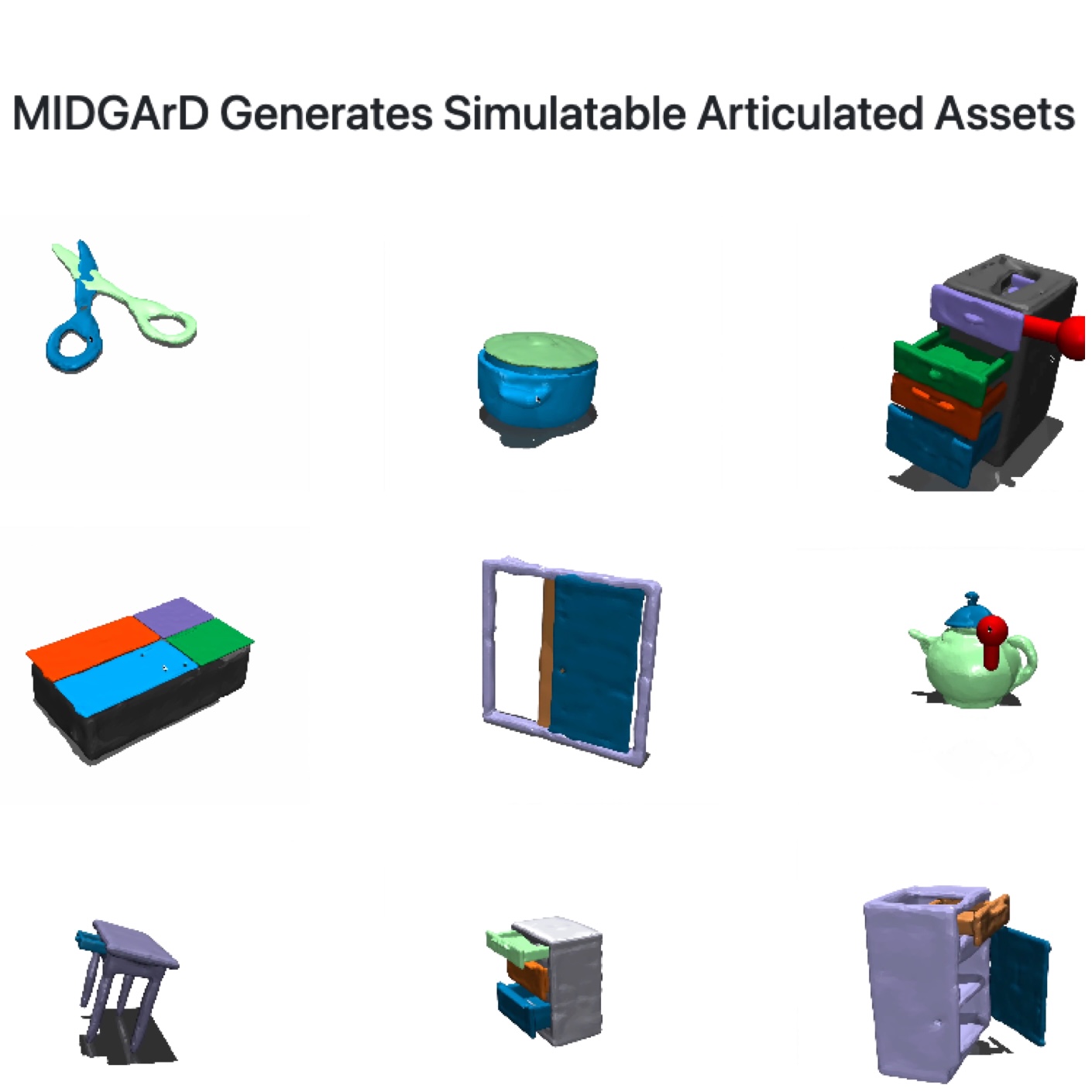
MIDGArD: Modular Interpretable Diffusion over Graphs for Articulated
Designs
Quentin Leboutet, Nina Wiedemann, Zhipeng Cai, Michael Paulitsch, Kai Yuan. NeurIPS, 2024 Project page / Paper / Code MIDGArD is a modular diffusion framework that generates articulated 3D assets with enhanced controllability, enabling seamless integration into physics engines for advanced digital content and robotics applications. |
|
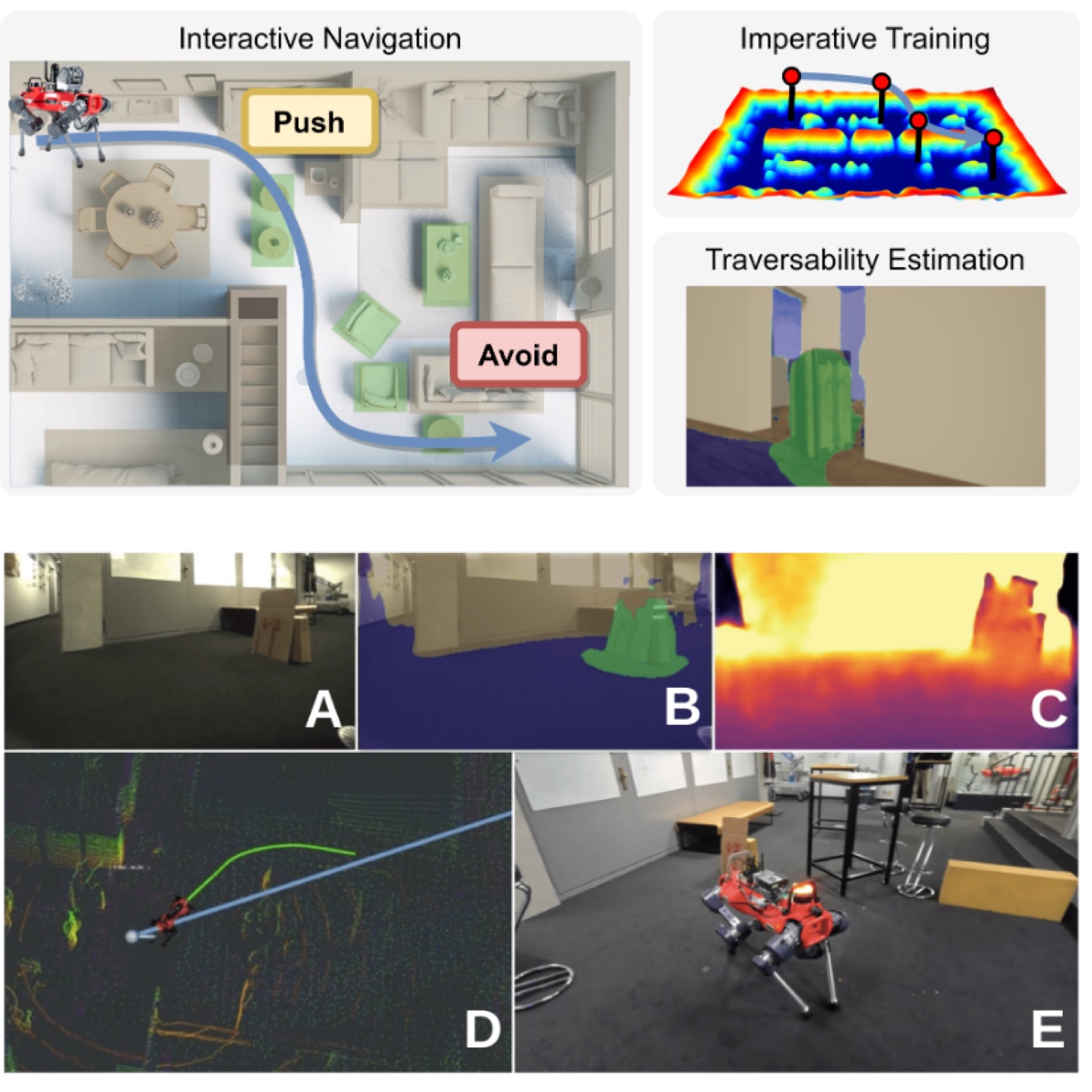
In-Sight: Interactive Navigation through Sight
Philipp Schoch, Fan Yang, Yuntao Ma, Stefan Leutenegger, Marco Hutter, Quentin Leboutet. IEEE IROS, 2024 Paper / Video IN-Sight is a self-supervised navigation system that supports interaction with obstacles using RGB-D data, enabling robots such as ANYmal to seamlessly navigate complex real-world environments. |
|
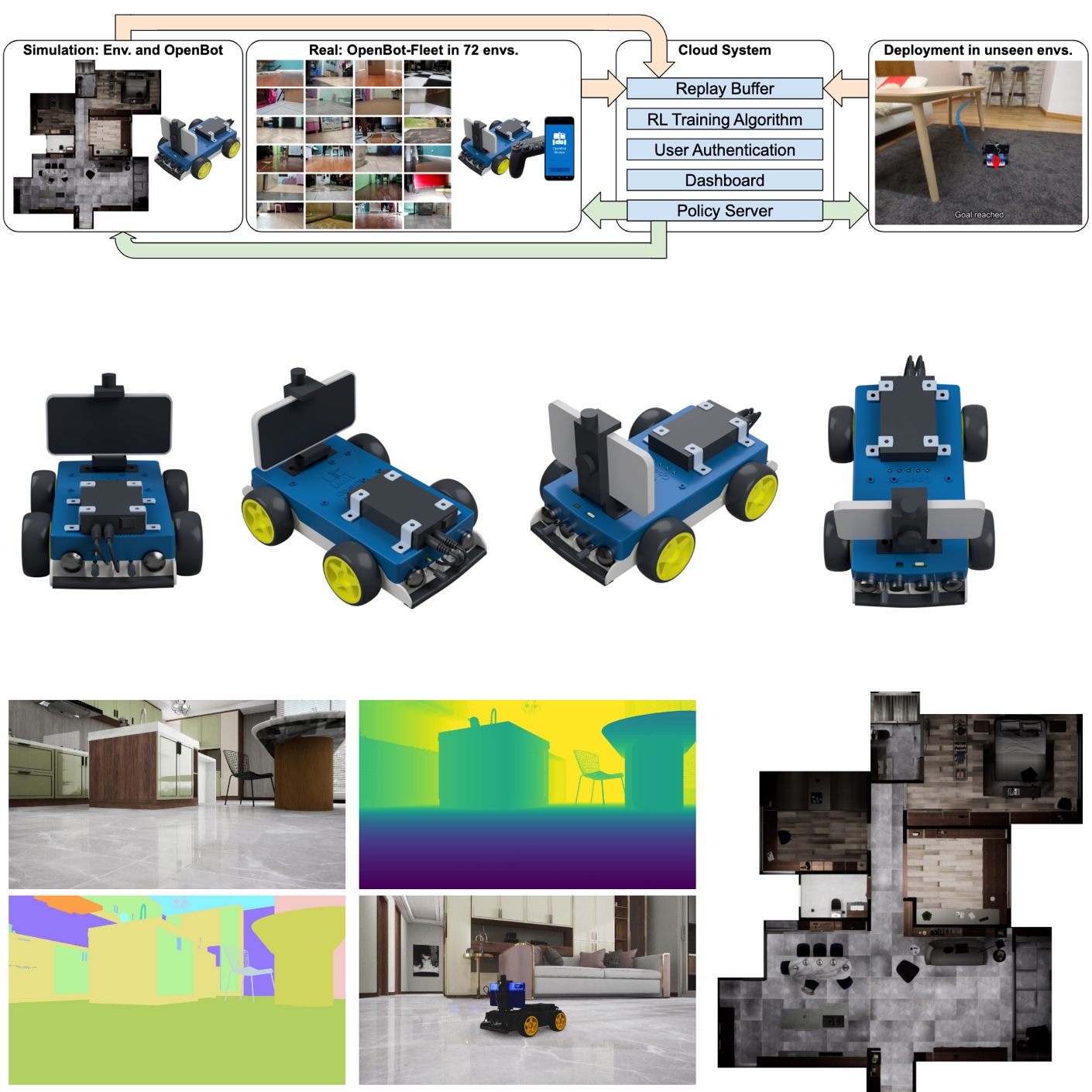
OpenBot-Fleet: A System for Collective Learning with Real Robots
Matthias Müller, Samarth Brahmbhatt, Ankur Deka, Quentin Leboutet, David Hafner, Vladlen Koltun. IEEE ICRA, 2024 Paper / Video / Supplementary Material OpenBot-Fleet is a scalable open-source cloud robotics system that leverages smartphones and affordable wheeled robots to learn and deploy robust navigation policies across real-world environments. |
|
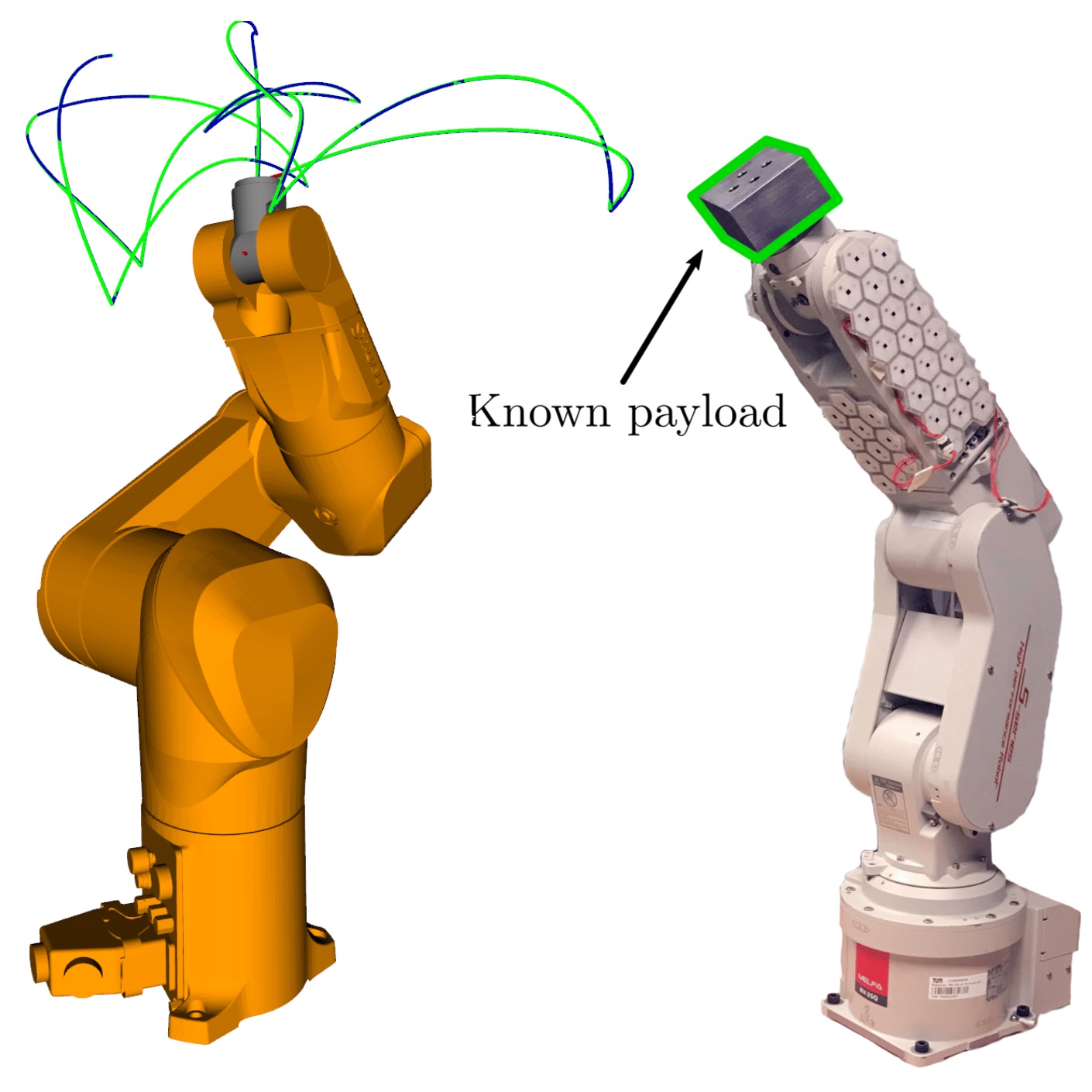
Inertial Parameter Identification in Robotics: A Survey
Quentin Leboutet, Julien Roux, Alexandre Janot, Julio Rogelio Guadarrama Olvera, Gordon Cheng. Applied Sciences, 2021, Best Paper Award Paper / Code / Supplementary Material / Data Introducing BIRDy: an open-source Matlab toolbox that benchmarks 17 cutting-edge inertial parameter identification methods, enabling precise robot dynamics analysis for both simulated and real-world manipulators. |
|
Second-order Kinematics for Floating-Base Robots using the Redundant
Acceleration Feedback of an Artificial Sensory Skin
Quentin Leboutet, Julio Rogelio Guadarrama Olvera, Florian Bergner, Gordon Cheng. IEEE ICRA, 2020 Paper A second-order kinematics estimation method that utilizes distributed inertial feedback and self-calibrating artificial skin to measure joint motions in humanoid robots, alleviating noise and lag issues. |
|
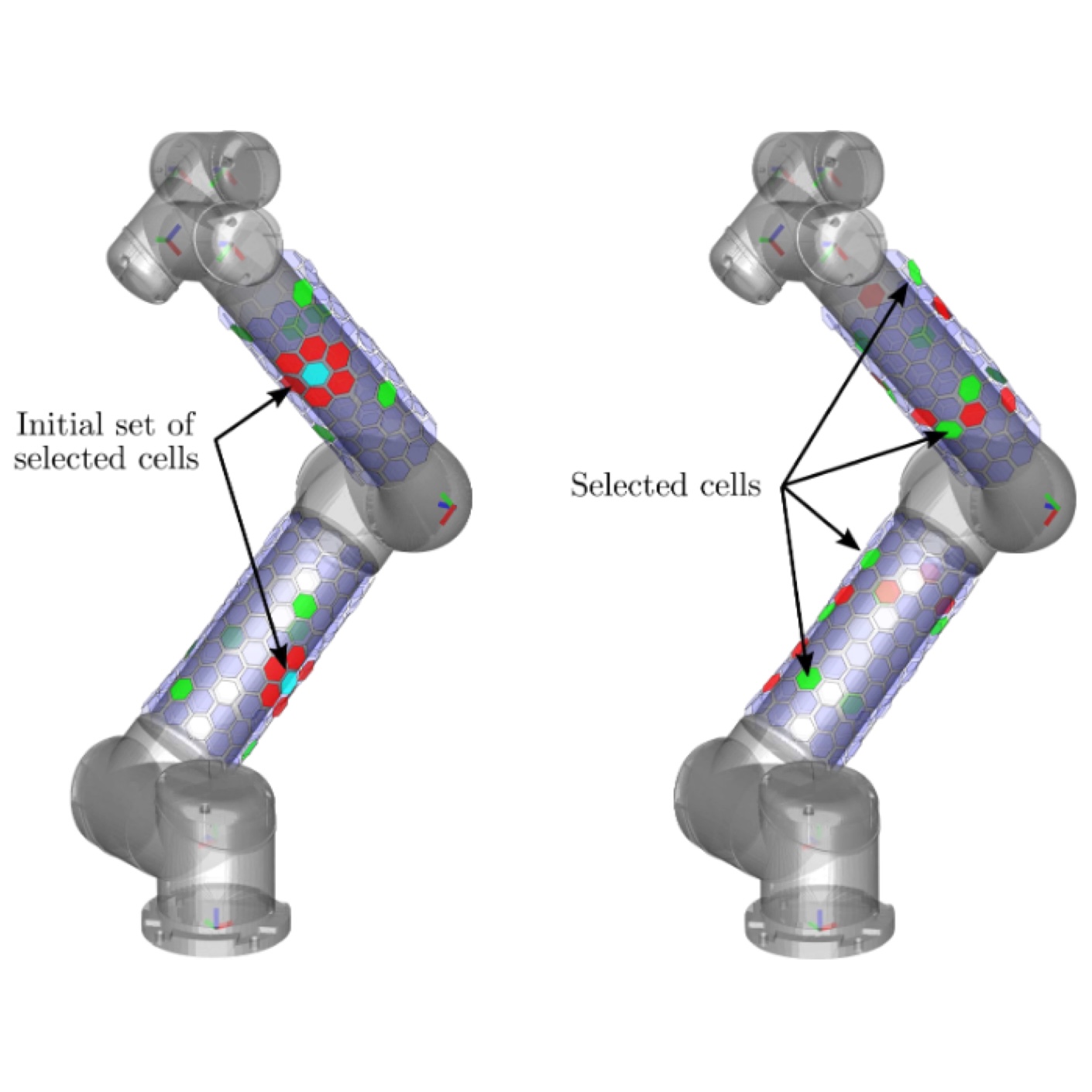
Online Configuration Selection for Redundant Arrays of Inertial Sensors:
Application to Robotic Systems Covered with a Multimodal Artificial Skin
Quentin Leboutet, Florian Bergner, Gordon Cheng. IEEE IROS, 2020 Paper An adaptive sensor-selection algorithm that dynamically optimizes inertial sensor usage on robots in real-time, enhancing scalability and robustness for high-order motion estimation in dynamic control applications. |
|
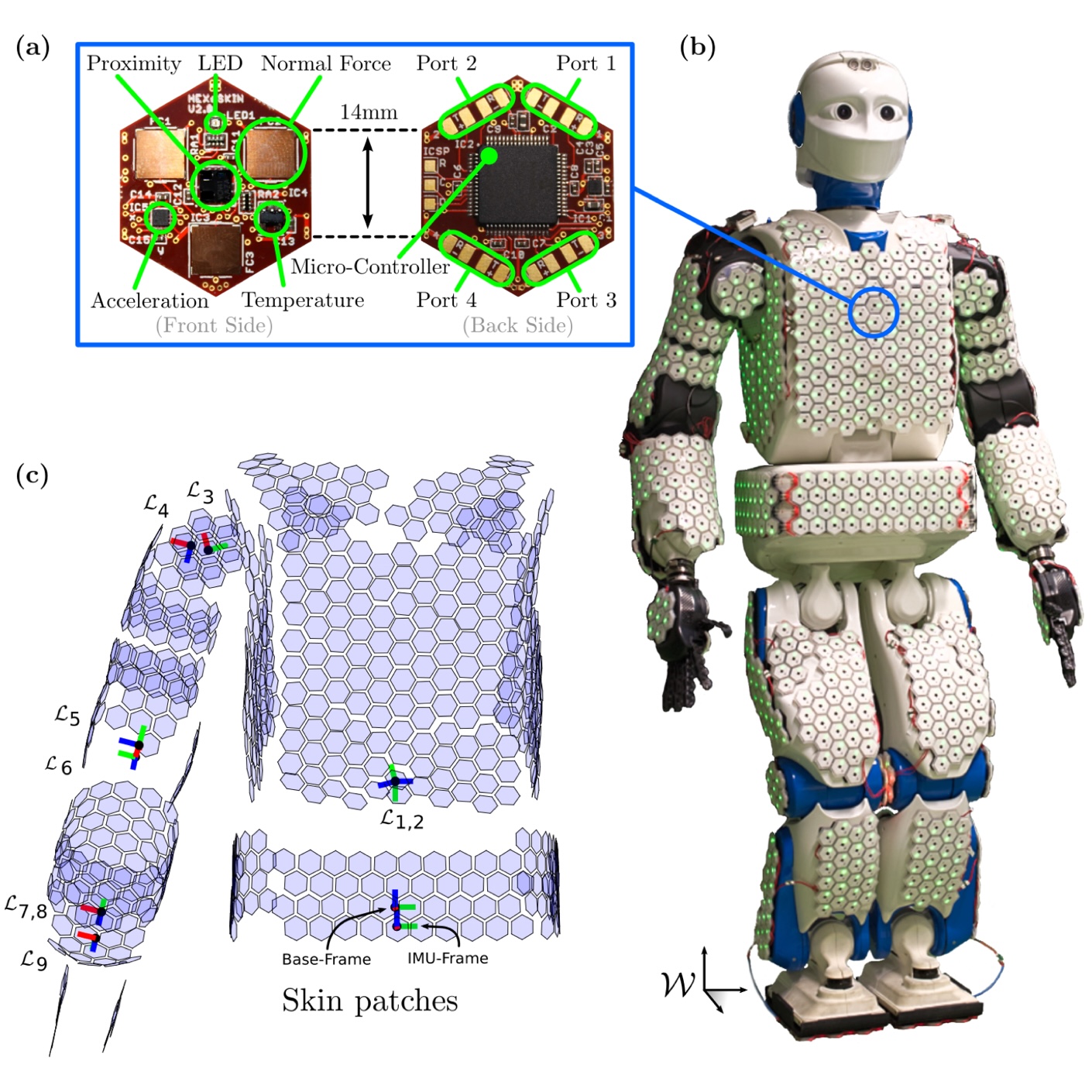
A Comprehensive Realization of Robot Skin: Sensors, Sensing, Control, and
Applications
Gordon Cheng, Emmanuel Carlos Dean León, Florian Bergner, Julio Rogelio Guadarrama Olvera, Quentin Leboutet, Philipp Mittendorfer. Proceedings of the IEEE, 2019 Paper A holistic approach to engineer the artificial skin for robots with an example of a multimodal skin cell showing multiple humanlike sensing modalities. |

|
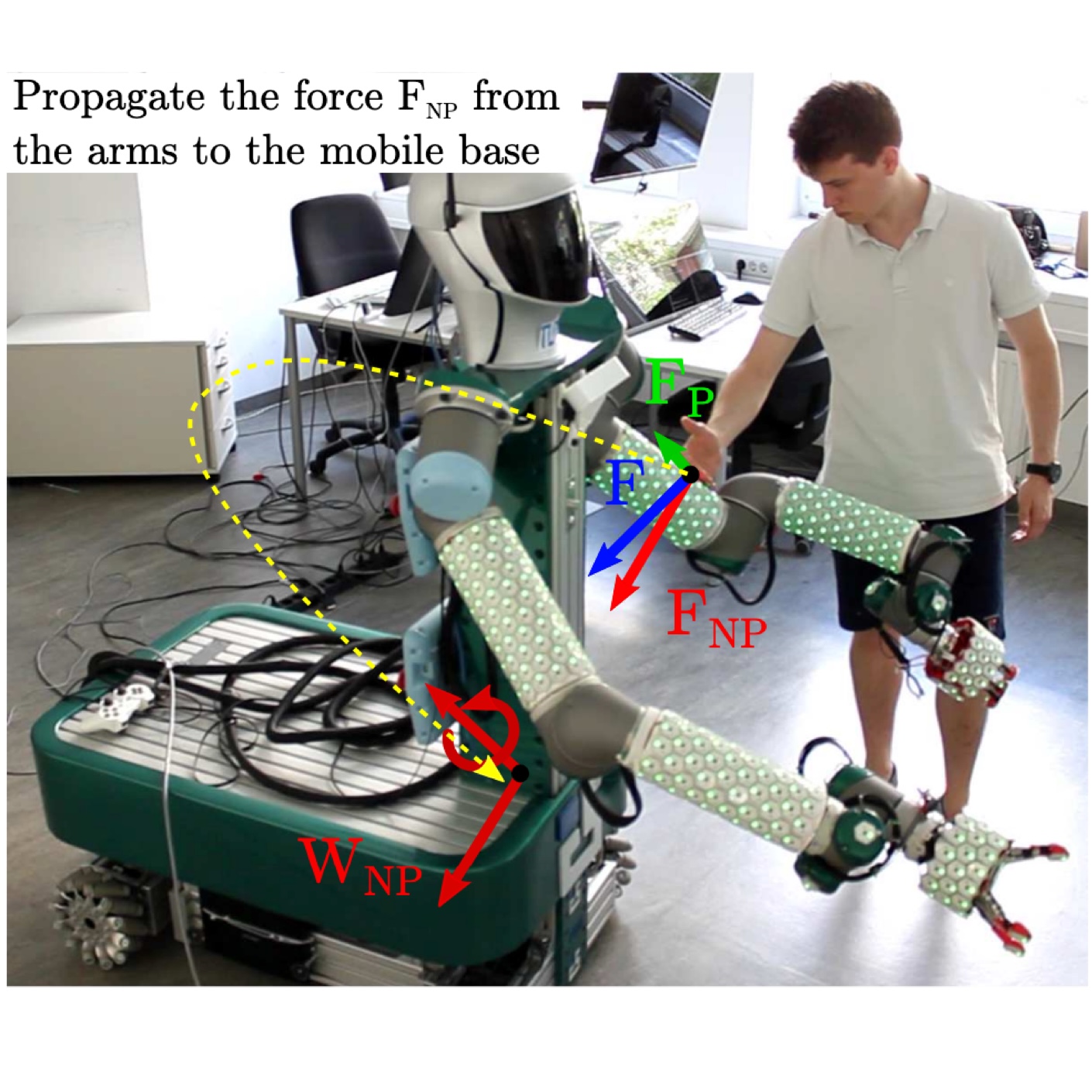
Tactile-Based Whole-Body Compliance with Force Propagation for Mobile
Manipulators
Quentin Leboutet, Emmanuel Carlos Dean León, Florian Bergner, Gordon Cheng. IEEE TRO, 2019 Paper / Video A quadratic programming-based tactile control framework that equips mobile robots with whole-body compliance through adaptive artificial skin, enabling robust and adjustable responses to multi-contact environmental interactions. |
|
Tactile-Based Compliance with Hierarchical Force Propagation for
Omnidirectional Mobile Manipulators
Quentin Leboutet, Emmanuel Carlos Dean León, Gordon Cheng. IEEE Humanoids, 2016 Paper / Video A quadratic programming-based framework that empowers omnidirectional mobile robots with whole-body compliance, utilizing artificial skin's tactile feedback to enable robust and prioritized interactions with complex environments. |
Teaching Activities |
|
Credits to Jon Barron for the website source code. |